Data analysis
- Mikecon Cenit
- Apr 30, 2019
- 2 min read



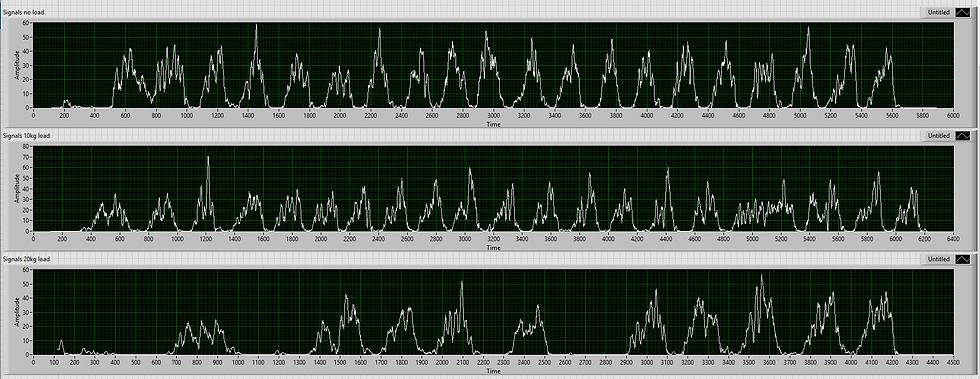
Base on the graph of EMG signal of ‘signal no load’ shown on the figure 1 shows;
Four amplitude spikes. The first and second amplitude spike located at 0 to 90 time is when the user is squatting down, as to be expected as the quadricep and hamstring muscle support the body to go down. Once the user reached the target squat down the legs muscle pass most of the load to the gluteus maximus as shown on the EMG amplitude drops at 90 to 105 time. On the other hand, the EMG third amplitude spikes up located at 105 to 132 time, this is due to the user squatting up. The body requires a massive workload impact force to move the weight of the body against gravity. The muscle relaxes as it reaches its baseline point/standing, as shows at 140 to 200 time. Once the user is standing up the weight load transferred parallel from the leg muscle on the bones towards the foot.
The comparison of the average EMG signal with different reactive force of spring as shown on Figure 1, Figure 2 and Figure 3 shows;
First half of the EMG amplitude pulse located mostly between 0-100 time are where the exoskeleton supports the user well as the body weight force pushes the legs down due to squat down.
There are overall lower average across EMG amplitude as the reactive force provided by the spring actuator increases.
As the reactive force of the spring increases the time it takes for the user to squat down also increase as the down ward force dampened by the spring. On the other hand, the squat up process time decreases as the stored potential energy inside the spring aids the user to stand up. Therefore, as the springs reactive force increases the work job time of full squat increase in the process.
The memory shape material actuator has a good property of absorbing the weight force of the body, but due to its mechanical properties. On the first half of the EMG signal where the user squats down the EMG signal indicates a lower EMG amplitude values as the reactive force of the spring increases.
The memory shape actuator fails to give the quick impulse reactive required to boost the biomechanical movement of squatting up. Addition actuator is needed to compensate the additional reactive force to boost the biomechanical movement of squatting up. Adding more shape memory foam to the system can give a bigger reactive force impulse. However, the process flow chart would be changing to accommodate time and biomechanical movement needed to convert more kinetic force from squatting down to potential energy stored inside the memory shape spring.

Comments